产品与系统
定制多维位移运动平台
针对有特殊实验要求的用户定制开发多维位移运动平台,满足客户个性化需求:
1、可开放软件接口,按客户需要定制设计软件;
2、可按需设计开发实验辅助装置。
系统主要由框架支撑、X向运动模组、Z向运动模组、旋转模组及伺服控制系统组成(轴数、行程等可定制)。
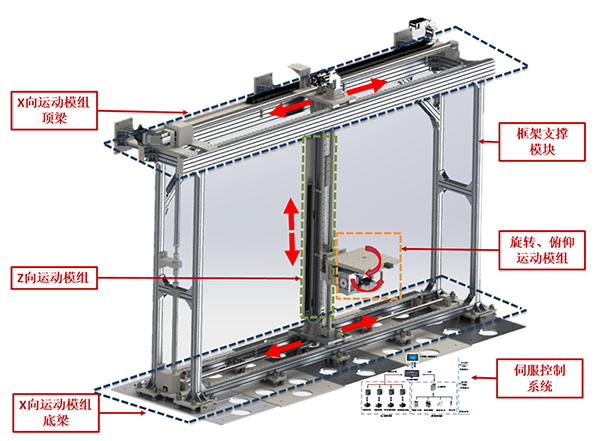
系统构成示意图
Ø 框架支撑模块:
加强型双龙门框架设计。采用前后双龙门组合、顶梁与底梁双梁模式,可以保证大行程运动下框架的整体刚度,满足整体运动行程内的精度需求。
Ø X向运动模组:
含顶梁运动模组和底梁运动模组两部分。两个模组共用一台伺服电机驱动,采用滚珠丝杠传动、双组导轨支撑导向,可以实现同步、高精度运动,满足X向运动行程及精度需求。
Ø Z向运动模组:
采用滚珠丝杠传动,导轨支撑导向,可以实现高精度运动,满足Z向运动行程及精度需求。
Ø 旋转、俯仰运动模组:
含旋转模组(绕Z轴运动)和俯仰模组(绕X轴运动)两部分。旋转、俯仰运动分别由1台高精度电机控制,可以实现高精度运动,满足旋转及俯仰运动行程及精度需求。
Ø 伺服控制系统:
根据系统性能要求,设备采用运动控制器作为主控单元,实现对X轴、Z轴、俯仰轴及旋转轴的精准控制,控制器具有完善的插补算法(如直线、圆弧插补等),可适应各种复杂的轨迹控制;执行单元采用伺服系统,从而保证运动过程的平稳性及安全性。
Ø 精度测量系统:
包含激光测距仪、激光定位显示系统等。
Ø 安全防护系统:
整个防护系统设有机械、电气、软件等多个层面的安全防护。
